Date: November 2018 - January 2019
Created By: Samuel Ryckman
Purpose: Drivetrain idea for 2019 E-Fest Student Design Competition
Features: Omnidirectional driving, compact, and might have even worked.
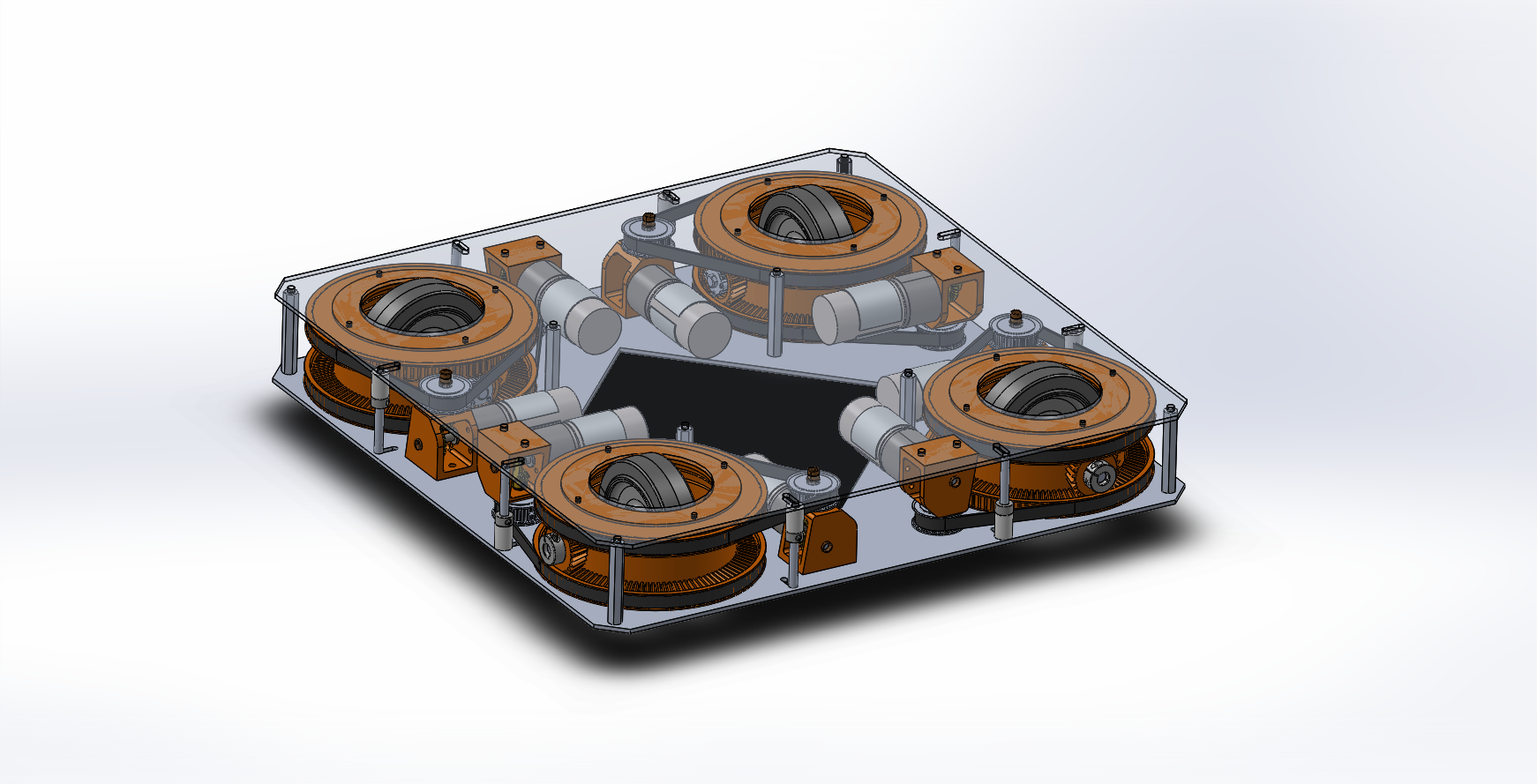
Swervebot is a drivetrain idea we had for the 2019 ASME Student Design Competition. Its main feature is a differential swerve drive system for omnidirectional motion. A standard swerve drive robot works by rotating wheels about their vertical axis so that they face in the direction the robot needs to move. This differential swerve drive design is more efficient since it does not require an additional motor for rotating the wheels (both motors are used for driving the robot).
Each wheel is built inside of a differential with two DC motors serving as the inputs. When the motors are turning in equal directions with equal speed, the wheel will rotate about its vertical axis. When the motors run with equal speed and opposite directions, the wheels will spin but not rotate about their vertical axis. In summary:
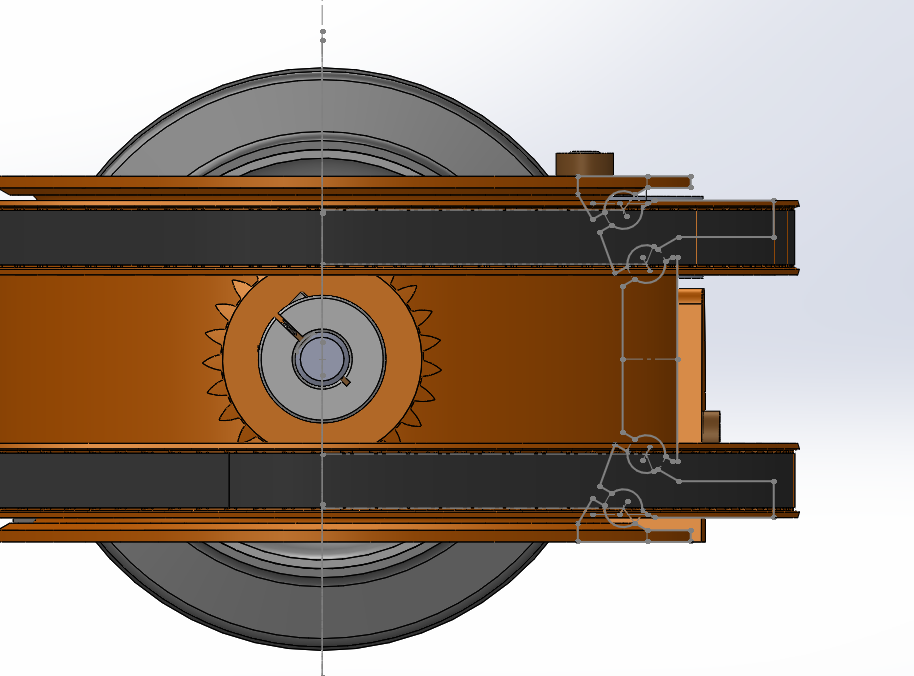
As it stands, the design is mostly complete and seems feasible. It uses 3D printed parts (orange pieces) for most of the components to reduce cost and difficulty of manufacturing. The wheel differentials are constructed using five rings. Each ring moves independently and has a set of ball bearings running in a grove between it and the next ring.
The primary concern with this design was whether the 3D printed components could hold up to usage at high speeds with large amounts of torque. A prototype bearing connection was printed and the motion was fairly smooth and held up to large amounts of pressure. No testing was done on the gear connections though.
The concept was eventually scrapped due to time limitations. We do still hope to finish this at some point though since it is a neat design.
© 2026 Rocker Robotics Team
Robotics@mines.sdsmt.edu
![]() |
|  |
|  |
| ![]()
South Dakota Mines, Rapid City, SD


 Rocker Central
Rocker Central